服務(wù)熱線
0755-83044319

發(fā)布時(shí)間:2024-05-25作者來源:薩科微瀏覽:1546
作者 | cao sir
去年3月14日,大洋彼岸的OpenAI正式發(fā)布其里程碑之作GPT-4,引起了行業(yè)轟動(dòng),今年過年期間,大洋彼岸的Open AI又扔出了另一款重磅級的科技產(chǎn)品SORA,代表著繼文字生成和圖片生成以后,視頻生成已經(jīng)成為可能。而在5月13號Open AI又發(fā)布了GPT-4o:能接受文本、音頻和圖像的任意組合輸入,還能生成文本、音頻和圖像的相關(guān)回應(yīng)。

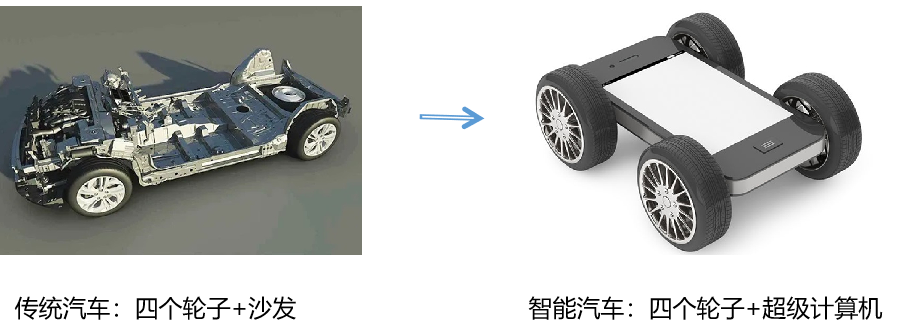
如果傳統(tǒng)汽車可以用四個(gè)輪子加一個(gè)沙發(fā)來概括,那么智能汽車將會是四個(gè)輪子加一個(gè)超級計(jì)算機(jī)。傳統(tǒng)汽車雖然也有電子功能,但更多的是簡單邏輯處理,功能固化無法升級迭代,而智能化時(shí)代汽車不僅有強(qiáng)大的數(shù)據(jù)處理能力,開放的API接口,可以支持軟件快遞開發(fā)和迭代,從而極大地提升了娛樂體驗(yàn)的維度。
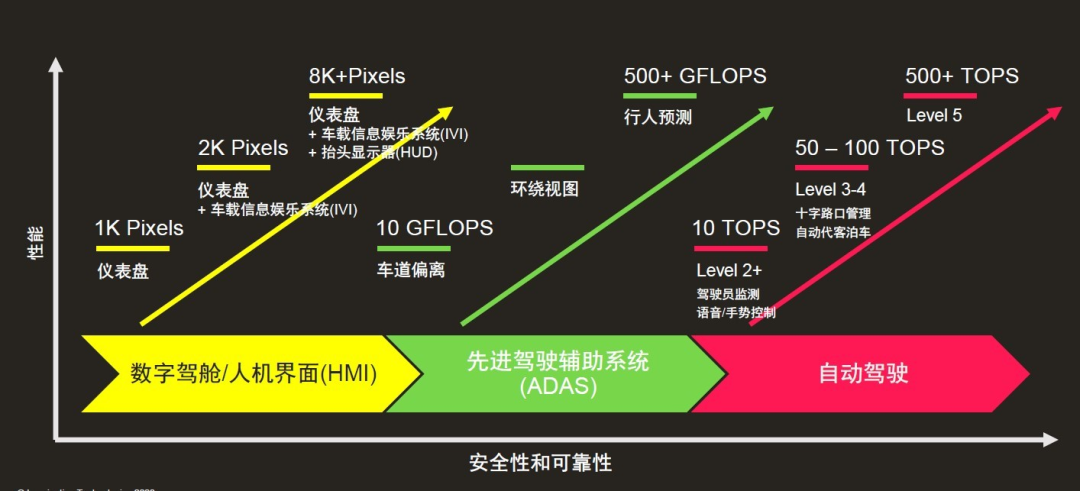
智能座艙包括操控系統(tǒng)、娛樂系統(tǒng)、空調(diào)系統(tǒng)、通信系統(tǒng)、座椅系統(tǒng)、交互系統(tǒng)、感知系統(tǒng)等給駕駛員和乘客更加安全、舒適、智能的駕乘體驗(yàn)。目前幾乎所有車廠都在智能座艙領(lǐng)域發(fā)力,即使連以保守著稱的日系車,也開始在車內(nèi)使用了大屏。
智能駕駛更是智能汽車的當(dāng)紅C位,最近許多新勢力車企發(fā)布會上,必然會單獨(dú)開一個(gè)章節(jié)講自己的城市NOA體驗(yàn)以及開城計(jì)劃,可以說城市NOA儼然已經(jīng)成為代表汽車智能化水平的標(biāo)志。
智能網(wǎng)聯(lián)的目標(biāo)是實(shí)現(xiàn)車與X(車、路、人、云端等)之間的智能信息交換、共享,且具備復(fù)雜環(huán)境感知、智能決策、協(xié)同控制等功能。智能網(wǎng)聯(lián)的重要標(biāo)志是V2X,但是客觀地講目前V2X的應(yīng)用場景還不夠豐富,未來隨著道路基礎(chǔ)設(shè)施建設(shè)的不斷發(fā)力,在“智慧的路”上跑“聰明的車”將會成為新常態(tài)。除此之外,智能網(wǎng)聯(lián)還支持將車輛運(yùn)行數(shù)據(jù)上傳到云端,并在云端重構(gòu)車輛運(yùn)行狀態(tài),這種數(shù)字孿生技術(shù)在遠(yuǎn)程故障檢測和診斷都有著深刻的應(yīng)用。
智能底盤包括線控轉(zhuǎn)向,線控制動(dòng)和線控懸架,在智能化時(shí)代,利用感知、決策、執(zhí)行模型,通過如人類”小腦”般精準(zhǔn)調(diào)節(jié)車輛X、Y、Z三個(gè)方向運(yùn)動(dòng)維度,大大提升車輛運(yùn)動(dòng)姿態(tài)。市場上代表性產(chǎn)品有理想”魔毯”底盤,比亞迪“云輦”底盤以及實(shí)現(xiàn)車輛”橫著走”的智己L6”靈蜥”底盤。
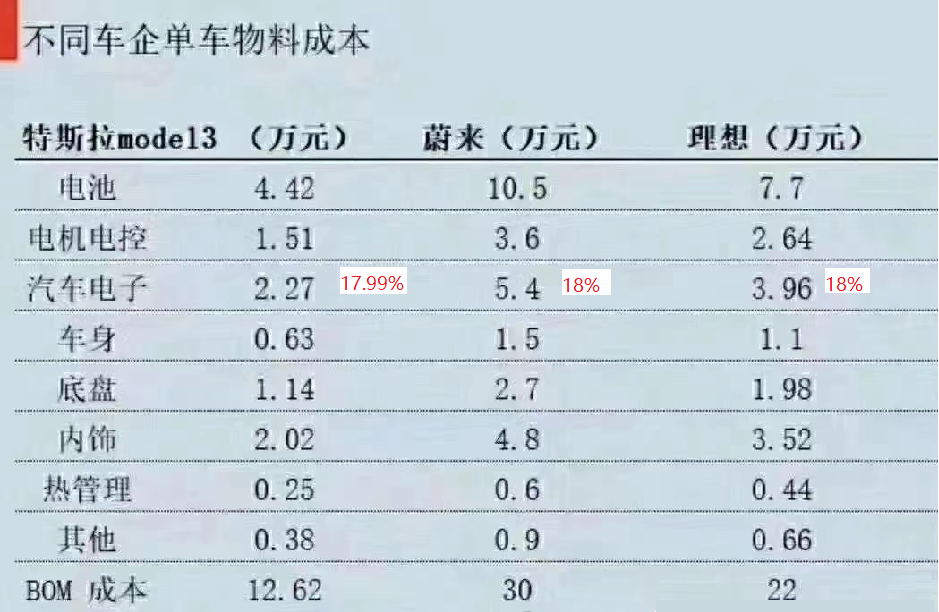
汽車電子是實(shí)現(xiàn)汽車演化的重要載體,從1908年世界上[敏感詞]個(gè)使用電池供電的汽車揚(yáng)聲器至今,汽車電子無論形態(tài)還是內(nèi)核都發(fā)生了深刻的變化,在智能化時(shí)代,各大車企主要圍繞“場景定義智能”,“數(shù)據(jù)定義體驗(yàn)”,“軟件定義汽車”三大主場、寸土必爭,因此,汽車電子要做到“兩高”、“兩底”、“兩可以”。
1、高集成

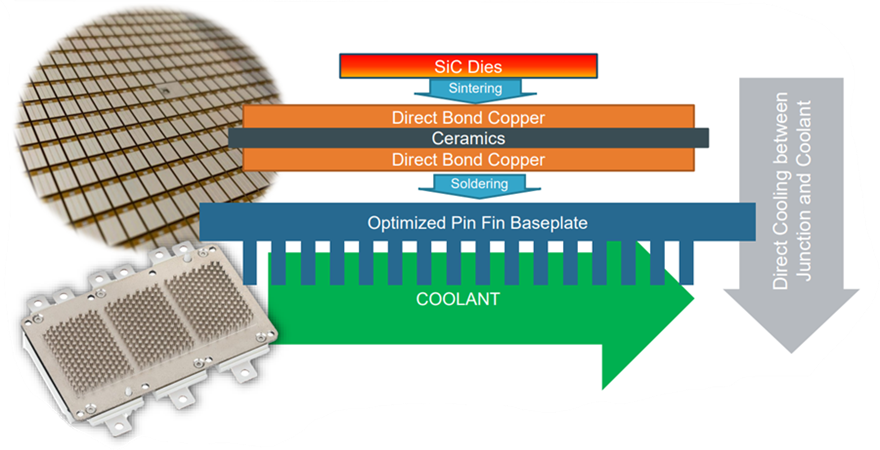
在電動(dòng)化時(shí)代,緩解續(xù)航里程焦慮,除了發(fā)展快充技術(shù)以外,降低整車能耗也是有效途徑之一,比如現(xiàn)在許多高性能電機(jī)的逆變器使用了SiC功率模塊,可以使電動(dòng)汽車整體能效提高 5%,從而使續(xù)航里程延長 5%。也就是說配備 100kW 電池、續(xù)航里程為 500 公里的電動(dòng)汽車,如果使用SiC 功率模塊的主驅(qū)逆變器,那么它的行駛里程則可達(dá) 525 公里,相當(dāng)可觀。除了高壓汽車電子部件以外,統(tǒng)計(jì)數(shù)據(jù)顯示,新能源汽車的整車低壓功耗每降低50w,在一個(gè)放電循環(huán)周期內(nèi)可以增加續(xù)航里程10km,為此汽車電子要考慮降低功耗。
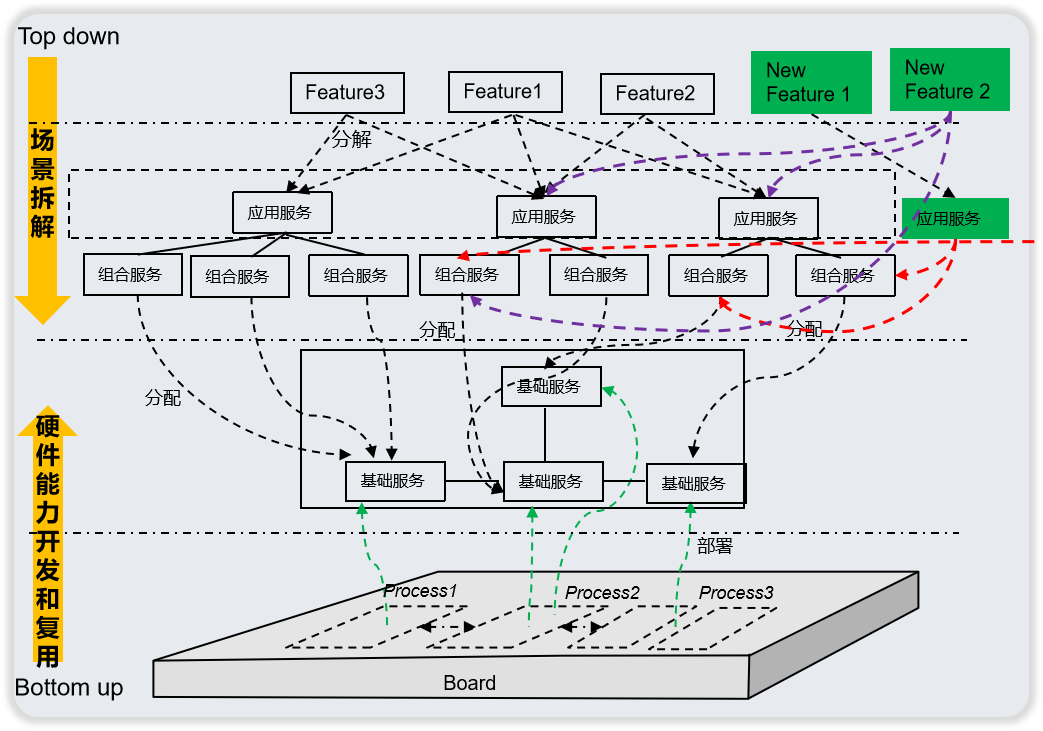
在汽車智能化時(shí)代,OTA技術(shù)讓功能和體驗(yàn)不斷更新成為可能,為滿足快速頻繁迭代的需求,以AUTOSAR為代表的分層式軟件架構(gòu),將中間RTE(Runtime Environment)作為虛擬功能總線VFB(Virtual Functional Bus)的實(shí)現(xiàn),解耦了上層的應(yīng)用軟件層(Application Layer)與下層的基礎(chǔ)軟件(Basic Software)的強(qiáng)關(guān)聯(lián)性。并通過SOA服務(wù)軟件架構(gòu),將汽車上一個(gè)一個(gè)原子化的功能服務(wù)化,通過定義良好的接口和協(xié)議進(jìn)行隨意編排、組合從而實(shí)現(xiàn)不同智能化場景并大大降低了開發(fā)周期和成本。
6、可信可靠
前面講了汽車智能化上半場主要集中在智能座艙,智能駕駛,智能網(wǎng)聯(lián),智能底盤四個(gè)領(lǐng)域發(fā)力,智能化下半場隨著AI大模型上車,L3加速落地,艙駕一體式中央大腦等標(biāo)志性事件已經(jīng)拉開序幕,將會對汽車電子發(fā)展產(chǎn)生深遠(yuǎn)影響。

首先,同樣采用Transformer作為底層技術(shù)的自動(dòng)駕駛成為汽車行業(yè)最先想到的大模型落地方向。例如這兩年在智駕領(lǐng)域大火的端到端自動(dòng)駕駛,就是使用大模型來做到感知決策一體化,而特斯拉的FSD Beta V12版本用神經(jīng)網(wǎng)絡(luò)替換了33萬行C++代碼。放眼國內(nèi),各大車企之間基于大模型能力開展的NOA開城戰(zhàn)正在如火如荼地進(jìn)行中。
其次,隨著以ChatGPT-4為代表的大語言模型成熟,語言大模型在智能座艙語言識別方面應(yīng)用方興未艾,去年以來,吉利、長城、紅旗、東風(fēng)日產(chǎn)、嵐圖等車企宣布與百度文心一言合作,廣汽、奇瑞將搭載科大訊飛的星火大模型,華為盤古大模型將上車問界M9,阿里通義千問在智己汽車首秀。在2024年的CES展上,奔馳發(fā)布的全新MB.OS車機(jī)系統(tǒng)搭載了全新虛擬助理,利用大型語言模型提供更自然的人機(jī)對話。
第三,AI大模型上車另一個(gè)重要應(yīng)用場景是允許車主成為智慧座艙開發(fā)者。在4月16日Create 2024百度AI開發(fā)者大會上,李彥宏提到“過去開發(fā)者用代碼改變世界;未來自然語言將成為新的通用編程語言,你只要會說話,就可以成為一名開發(fā)者,用自己的創(chuàng)造力改變世界“,也就是說,未來,每位車主都將享有在車內(nèi)自主創(chuàng)建AI原生智艙應(yīng)用的便利,這些應(yīng)用將能夠充分利用車輛的各種功能。相較于當(dāng)前基于SOA服務(wù)的自主開發(fā)模式,這一新方法將更為簡易,為車主帶來前所未有的個(gè)性化體驗(yàn)。另外,隨著AI大模型逐步上車,近期對AI 算力的總需求約 500~600TOPS ,中長期 1000TOPS 左右,在不同類型芯片算力發(fā)展方面,經(jīng)典的CPU“摩爾定律”增速放緩, GPU AI 算力的 “黃氏定律”和大模型算法的“規(guī)模法則” 共同推動(dòng) AI 芯片算力的“非線性”發(fā)展。
2、L3加速落地

感知冗余:自動(dòng)駕駛系統(tǒng)需要依靠多種傳感器(如雷達(dá)、攝像頭、激光雷達(dá)等)來感知周圍環(huán)境。感知冗余意味著系統(tǒng)具有多個(gè)相同或不同類型的傳感器,以在其中一個(gè)傳感器失效時(shí),其他傳感器仍然能夠正常工作,提供準(zhǔn)確的環(huán)境感知數(shù)據(jù)。
計(jì)算冗余:自動(dòng)駕駛系統(tǒng)需要強(qiáng)大的計(jì)算能力來處理和分析來自傳感器的數(shù)據(jù)。計(jì)算冗余可以通過使用多個(gè)處理器或計(jì)算機(jī)來實(shí)現(xiàn),以確保在一個(gè)處理器或計(jì)算機(jī)出現(xiàn)故障時(shí),其他處理器或計(jì)算機(jī)能夠繼續(xù)執(zhí)行關(guān)鍵任務(wù)。
制動(dòng)冗余:制動(dòng)系統(tǒng)是自動(dòng)駕駛汽車的重要組成部分,負(fù)責(zé)在必要時(shí)減速或停車。制動(dòng)冗余可以通過使用多個(gè)制動(dòng)系統(tǒng)或備用制動(dòng)系統(tǒng)來實(shí)現(xiàn),以確保在主要制動(dòng)系統(tǒng)失效時(shí),車輛仍然能夠安全停車。
轉(zhuǎn)向冗余:轉(zhuǎn)向系統(tǒng)負(fù)責(zé)控制車輛的行駛方向。轉(zhuǎn)向冗余可以通過使用多個(gè)轉(zhuǎn)向執(zhí)行器或備用轉(zhuǎn)向系統(tǒng)來實(shí)現(xiàn),以確保在主要轉(zhuǎn)向系統(tǒng)失效時(shí),車輛仍然能夠按照駕駛員或系統(tǒng)的指令進(jìn)行轉(zhuǎn)向。
通信冗余:自動(dòng)駕駛汽車需要與周圍環(huán)境和其他車輛進(jìn)行通信,以獲取實(shí)時(shí)交通信息和避免碰撞。通信冗余可以通過使用多種通信協(xié)議和備用通信通道來實(shí)現(xiàn),以確保在主要通信通道失效時(shí),車輛仍然能夠接收和發(fā)送關(guān)鍵信息。
電源冗余:配備主電源系統(tǒng)和備份電源系統(tǒng),采用電源隔離設(shè)計(jì),確保每個(gè)系統(tǒng)都能獨(dú)立供電。同時(shí)前面提到的傳感器、智駕控制器、制動(dòng)/轉(zhuǎn)向控制器要支持雙電源輸入,當(dāng)有一路輸入出現(xiàn)故障時(shí),維持系統(tǒng)正常工作。
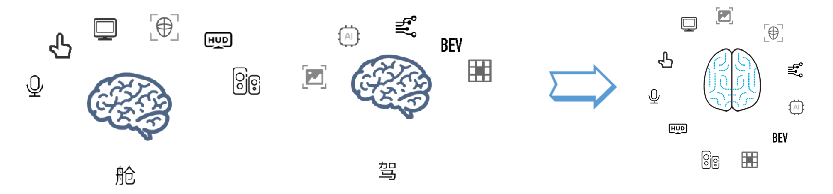
3、艙駕一體化中央大腦
艙駕一體化指的是將座艙域和智能駕駛域集成到一個(gè)高性能計(jì)算單元中,以同時(shí)支持智能駕駛和智能座艙功能。通過硬件和軟件的融合,艙駕一體化能夠顯著減少域控和芯片的投入,降低線束數(shù)量,從而節(jié)省成本,例如,通過共用一套冷卻系統(tǒng),共享內(nèi)存,共享算力,可節(jié)省約30%的成本,另外由于艙駕場景的完全打通,不僅帶來了更多的功能,還提升了功能體驗(yàn)。
艙駕一體化的實(shí)現(xiàn)方式主要有三種:把座艙域PCB板和智駕域PCB板集成在一個(gè)控制器盒子的ONE Box方案,將座艙域芯片、駕駛域芯片以及高效的CPU進(jìn)行集成在一塊PCB板子上的ONE Board方案,用一塊芯片做智艙和智駕功能的ONE Chip方案。目前芯片巨頭英偉達(dá)、高通都官宣自己的艙駕一體芯片在2025年左右推出。
俗話說“理想很豐滿現(xiàn)實(shí)很骨感”,摘下艙駕一體化的桂冠并沒有想象中的容易,目前還存在許多挑戰(zhàn):
1、SoC芯片的挑戰(zhàn):座艙芯片主要承擔(dān)圖形處理等計(jì)算任務(wù),對GPU算力要求高;而智駕芯片則主要負(fù)責(zé)深度學(xué)習(xí)等任務(wù),對NPU算力有特定要求。因此,在艙駕一體化中,需要找到能同時(shí)滿足這兩種不同計(jì)算需求的SoC芯片,這是一個(gè)技術(shù)上的挑戰(zhàn)。
AI大模型在汽車智能化中扮演著至關(guān)重要的角色。這些模型能夠處理海量的數(shù)據(jù),通過深度學(xué)習(xí)和自我優(yōu)化,不斷提升對復(fù)雜路況和駕駛環(huán)境的感知與判斷能力。這使得汽車能夠更準(zhǔn)確地預(yù)測和應(yīng)對各種駕駛情況,從而提高行車的安全性和舒適性。
L3智能駕駛的落地是汽車智能化進(jìn)程中的又一重要里程碑。L3級別的智能駕駛意味著車輛可以在特定情況下自主駕駛,減輕駕駛者的負(fù)擔(dān),提高駕駛的便捷性。然而,這一技術(shù)的實(shí)現(xiàn)需要高精度地圖、傳感器以及強(qiáng)大的計(jì)算能力等支持,以確保車輛在各種路況下都能安全可靠地行駛。
艙駕一體化則是汽車智能化發(fā)展的另一大趨勢。它將駕駛艙與智能駕駛系統(tǒng)緊密結(jié)合,為駕駛者提供更加人性化、智能化的駕駛體驗(yàn)。通過艙駕一體化,駕駛者可以更加便捷地控制車輛的各種功能,同時(shí)享受更加豐富的娛樂和信息服務(wù)。
免責(zé)聲明:本文采摘自網(wǎng)絡(luò),本文僅代表作者個(gè)人觀點(diǎn),不代表薩科微及行業(yè)觀點(diǎn),只為轉(zhuǎn)載與分享,支持保護(hù)知識產(chǎn)權(quán),轉(zhuǎn)載請注明原出處及作者,如有侵權(quán)請聯(lián)系我們刪除。
友情鏈接:站點(diǎn)地圖 薩科微官方微博 立創(chuàng)商城-薩科微專賣 金航標(biāo)官網(wǎng) 金航標(biāo)英文站
Copyright ?2015-2024 深圳薩科微半導(dǎo)體有限公司 版權(quán)所有 粵ICP備20017602號
